

Robot line follower atau dalam bahasa inggris Line Follower Robot, adalah sebuah robot yang bisa bergerak mengikuti garis tebal berwarna hitam. Bagaimanakah bisa robot ini mengikuti garis hitam? Tentulah diperlukan sebuah sensor, yaitu sensor proximity. Sensor ini bisa kita buat sendiri. Prinsip kerjanya sederhana, hanya memanfaatkan sifat cahaya yang akan dipantulkan jika mengenai benda berwarna terang dan akan diserap jika mengenai benda berwarna gelap. Sebagai sumber cahaya kita gunakan LED (Light Emiting Diode) yang akan memancarkan cahaya merah dan untuk menangkap pantulan cahaya LED kita gunakan photodiode. Jika sensor berada diatas garis hitam maka photodioda akan menerima sedikit sekali cahaya pantulan. Tetapi jika sensor berada diatas garis putih maka photodioda akan menerima banyak cahaya pantulan.
Berikut adalah ilustrasinya :

Cara Kerja Sensor Proximity a) Cahaya pantulan sedikit, b) Cahaya pantulan banyak
Sifat dari photodioda adalah jika semakin banyak cahaya yang diterima, maka nilai resistansi diodanya semakin kecil. Dengan melakukan sedikit modifikasi, maka besaran resistansi tersebut dapat diubah menjadi tegangan. Sehingga jika sensor berada diatas garis hitam, maka tegangan keluaran sensor akan kecil, demikian pula sebaliknya.
Agar dapat dibaca oleh mikrokontroler, maka tegangan sensor harus disesuaikan dengan level tegangan TTL yaitu 0 – 1 volt untuk logika 0 dan 3 – 5 volt untuk logika 1. Pada robot line tracker, sedikitnya diperlukan 2 buah sensor proximity yang disusun agar keduanya berada tepat diatas garis hitam. Perhatikan gambar berikut :

Gambar 2. Posisi Sensor Proximity Pada Garis Hitam a) Sensor ditengah garis, b) Sensor dikiri garis, c) Sensor di kanan garis.
Pada Gambar 2.a diatas kedua buah sensor proximity berada diatas garis hitam, maka mikrokontroler akan memerintahkan robot untuk bergerak lurus. Namun jika posisi sensor seperti pada Gambar 2.b, maka robot harus belok ke kanan. Dan jika posisi sensor seperti pada Gambar 2.c, maka robot harus belok ke kiri. Dengan demikian robot akan tetap bergerak mengikuti garis hitam. Berikut adalah rangkaian lengkap dua set sensor proximity untuk robot line tracker :

Rangkaian Sensor Proximity
Sebagai ”otak” robot maka menggunakan mikrokontroler AVR jenis Atmega8535 yang akan membaca data dari sensor proximity, mengolahnya, kemudian memutuskan arah pergerakan robot. Pada robot line track ini, keluaran sensor proximity dihubungkan ke PortA.0 dan PortA.1 pada mikrokontroler. Sedangkan driver motor dihubungkan ke PortC.0 s/d PortC.3 seperti yang terlihat pada gambar berikut :
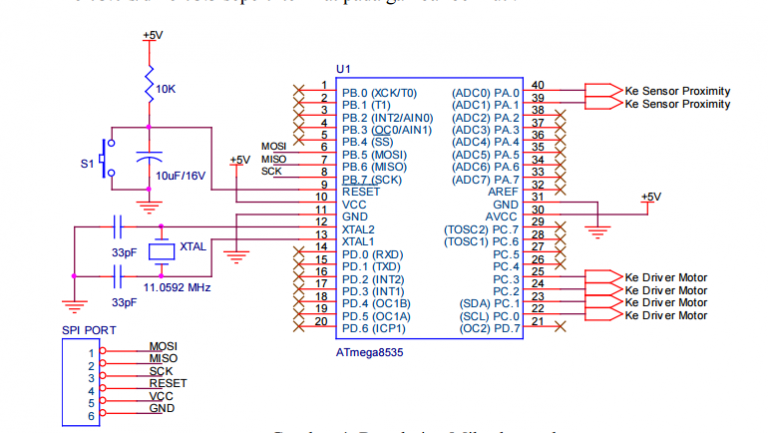
Rangkaian Mikrokontroler
Agar dapat ”berfikir”, maka mikrokontroler harus diprogram terlebih dahulu. Berikut ini adalah program robot line track yang dibuat menggunakan software CodeVisionAVR.
Setelah selesai membuat program, maka kita harus men”download”nya ke dalam mikrokontroler. Untuk menggerakkan motor dc, diperlukan sebuah driver motor dc yaitu IC L298 yang dirangkai seperti pada gambar berikut :

Rangkaian Driver Motor DC
Setelah semua rangkaian dapat berfungsi dengan baik, selanjutnya kita dapat membuat desain mekanik robot line tracker sebagai berikut :

Untuk menguji apakah robot sudah dapat berfungsi dengan benar, maka buatlah sebuah arena permainan seperti pada gambar berikut ini :

Jika semua rangkaian dan desain robot berfungsi dengan baik, maka robot dapat bergerak mengikuti garis hitam sesuai dengan bentuk track diatas. Selamat sekarang anda sudah berhasil membuat sebuah robot line follower.

Sumber : www.teknikelektro.org
I am a student of Electrical Engineering department of Sultan Ageng Tirtayasa University
9 comments
Click here for commentswih sangat bermanfaat mau nyoba ah :)
Replysusah dan ribet ya gan , saya cuma bisa liat aja :(
ReplySangat berguna buat saya yang notabane nya anak jurusan teknik elektro juga seperti penulis artikel ini :) Thanks gan artikelnya .. ^_^
ReplyMantap.. sangat bermanfaat artikelnya :)
ReplyKebetulan sekali saya juga masih main mikrokontroler gan, terimakasih infonya
ReplyRalat gan photodioda itu sensor cahaya gan bukan sensor proxymity. Kalo sensor proxymity itu sensor yg membaca suatu benda yg berada di depannya baik berupa besi, kayu, maupun plastik. Kalo line follower yg diatas itu sistem kerjanya menggunakan sensor cahaya
Replykebetulan jurusan ane cuma multimedia jadi nyimak aja sekalian nambah wawasan aja hehe
Replyharus paham dasarnya dulu nih kalo pengen buat" kayak gini kan ya
Replyjujur ane gak paham soal ginian , ijin menyimak aja deh sambil di pelajari sedikit demi sedikit
ReplyConversionConversion EmoticonEmoticon